能给葡萄缝针,华为天才少年稚晖自制机械臂有多强?
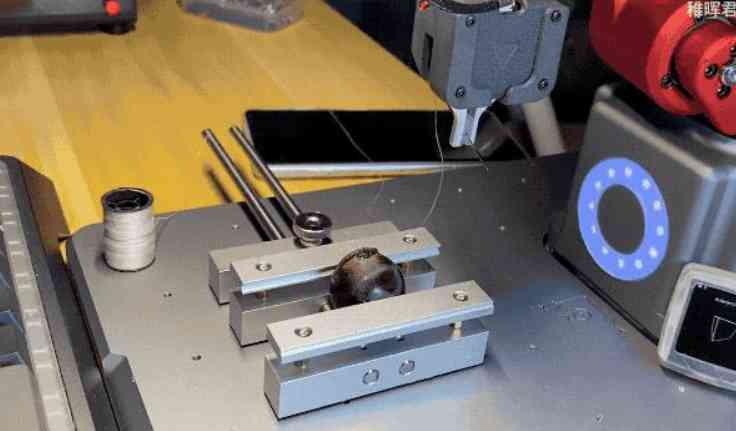
“华为天才少年稚晖自制机械臂有多强”:成本不到1万元,能给葡萄缝针。据作者本人回应这只是一个业余小项目,没有想到能够引起大家的讨论,而且还在回应中写道发明与华为公司没有关系,而且这种自制机械臂原理简单,但是能够做到人手都难以完成的给葡萄缝针,他的自制机械臂有多强?
“华为天才少年稚晖自制机械臂有多强”:成本不到1万元,能给葡萄缝针。据作者本人回应这只是一个业余小项目,没有想到能够引起大家的讨论,而且还在回应中写道发明与华为公司没有关系,而且这种自制机械臂原理简单,但是能够做到人手都难以完成的给葡萄缝针,他的自制机械臂有多强?

100
关注
1w
浏览
声息
最后编辑于2022-12-20 21:44
写回答
关注问题
邀请回答
1个回答
默认
时间

宋小睿
已帮助37位姐妹
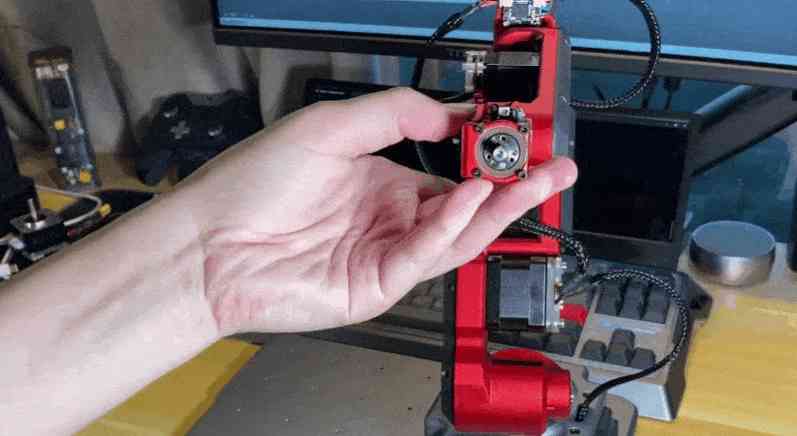
作者回应这个自制机械臂中运用了电机驱动器、基于IMU的动作捕捉手套、基于双目视觉的乒乓球机器人、基于AR的APP等技术,这台机械臂拥有特殊且实用的交互方式。除了传统的电脑输入指令、图形化相位机、手动示教等方式操控外还加入了一块显示屏,可以通过无线连接来直观看到机械臂动作并控制它。
作者将自己自制机械臂的过程分为三步:功能设计、理论分析、技术路线,在后续的操作当中依次要解决电机、驱动器、减速器这三大核心部分的设计。这台机械臂软件核心在于算法,其中就包括运动学正逆解的算法和动力学模型的实现。
自制机械臂爆火背后的意义
稚晖自制机械臂在网上的爆火其实还说明了中国在机械臂方面的技术较为薄弱,清华大学人工智能研究院教授张钹在2021年世界机器人大会演讲时提到的:国产工业机器人多集中于低端应用领域。而且像稚晖制作的这种可以做精细外科手术的机械臂少之又少,中国在机械臂前路依旧漫长。
78 赞
2021-10-09
暂无更多
相关推荐




dha胶囊怎么吃才是正确的,是该咬破还是直接吞下? 
张云昌 已帮助2位姐妹
一般两岁内的宝宝每日摄入DHA不少于100mg。DHA的主要是从日常饮食中进行补充,DHA潜藏在海鲜类、鱼类、坚果 ...
19 赞 0 评论 2021.03.08
带孩子做什么能既长知识,又增强能力,还不枯燥孩子能接受的? 
以泪洗面奶 已帮助52位姐妹
你可以选择带孩子到博物馆、名人故里去游玩参观,这些地方孩子会感到新奇,是非常愿意去的,而且去这些地方孩子你可以给孩 ...
9 赞 0 评论 2021.01.14
生完孩子后经常感到焦虑,应该怎么办?
以泪洗面奶 已帮助52位姐妹
你如果生完孩子经常感到焦虑的话你要看是不是有产后抑郁症,你看看是否有一下症状,如果就要尽快治疗产后抑郁。是否感觉很 ...
60 赞 0 评论 2021.01.14
宝宝18个月胃肠道紊乱,该怎么调理过来? 
icelee 优秀视频创作者
宝宝胃肠道紊乱的话,你可以尝试一下用这些方法调理的一下,还是很有效果的:多吃水果平衡消化,比如多吃些苹果和番石榴可 ...
32 赞 0 评论 2021.01.14
6个月的宝宝适合哪一种牌子的dha奶粉呢? 
汪曲攸 已帮助2位姐妹
新生儿在六个月后就要补充dha,dha有助于大脑发育,家长们都希望能给宝宝喂这样奶粉,但市面上dha含量高的奶粉也 ...
3 赞 0 评论 2021.03.08
怀孕建档有诀窍!第一次要宝宝的姐妹快get起来,防踩坑! 
视觉质男 已帮助2位姐妹
建档对于怀孕后的女性来说是非常重要的事,每个孕妇都需要到对应的医院进行建档,以便后续的各项检查记录和登记。那么为什 ...
66 赞 0 评论 2022.04.29
为什么只要女人过了三十岁就再也不建议生孩子了? 
陈金福 已帮助36位姐妹
不建议三十岁以后的女人生孩子是因为此时怀孕容易引发妊娠并发症并且产后身体恢复慢,同时胎儿的畸形率也比较高。30岁以 ...
78 赞 0 评论 2022.04.29
二胎妈妈十个大招保你儿女双全,拿走不谢! 
范可可 已帮助1位姐妹
首先就是备孕二胎的注意事项了。有的宝妈为了性别使用一些碱胶,或者特殊的阴道用剂,但其实这些都是没有用的,还很容易患 ...
128 赞 0 评论 2022.04.29
别被影视剧误导了!这样生孩子不仅影响体力,还影响正确发力! 
顾福生 已帮助1位姐妹
宫口全开时,孕妇开始屏住呼吸用力,当宫缩开始的时候,孕妇需要深吸气,然后适当憋气,然后用尽全力向肛门以及外阴的方向 ...
12 赞 0 评论 2022.04.29
人授失败再试管?别交智商税!不符合这3个条件直接选后者 
黏黏世界 已帮助2位姐妹
首先人授是有前提条件的:女方至少一条输卵管通畅,如果不符合这个条件就不用纠结了,直接选择试管吧。当然,如果是符合条 ...
178 赞 0 评论 2022.04.29
写回答